The following will act as lecture notes to help you review the material from lecture for the
assignment. You can click on the links below to get directed to the appropriate section or
subsection.
OpenGL (Open Graphics Library) is a cross-language, multi-platform API for rendering 2D
and 3D graphics. It provides a plethora of functionality that automatically handles
tedious graphics computations for us. For instance, all the matrix manipulations and
the lighting and shading computations that you had to do manually in the previous
two assignments are automatically done for us in OpenGL with some simple function
calls.
For this class, we will be using OpenGL 3.0. It is not the newest version of OpenGL, but it is
stable; and it contains all the necessary functionality for this class. Most of the syntax
in OpenGL 3.0 carries over to the newer versions, so you should still be able to use
more modern OpenGL without too much difficulty after this class. The main difference
between OpenGL 3.0 and the newer versions is that OpenGL 3.0 depends on glut,
which has been deprecated on Mac OS. Keep this in mind when looking into newer
versions.
To help you learn how to write programs using OpenGL, we have provided a different kind of
“lecture notes” than what you are used to. Rather than trying to explain OpenGL syntax on this
webpage, we believe that it would be more effective to learn by seeing the syntax used in actual
source code. Hence, the “lecture notes” for OpenGL are actually extensive, instructive comments
in this demo program. This is the same demo program that we asked you to run previously
to test your OpenGL environment, and it is also included within the Assignment 3
files.
As a note, the demo does not cover the OpenGL Shading Language (GLSL for short). GLSL will
be covered in the next set of notes.
The comments and code are all in the opengl_demo.cpp file. You may consider the file to be a
template for writing your own OpenGL programs.
The Arcball is an intuitive method proposed by Ken Shoemake in 1992 for manipulating
and rotating a scene with the mouse [1]. Ever since its introduction, the Arcball has
become the primary mechanism that people use to rotate scenes and objects in a 3D
computer environment. You may have already encountered the Arcball or variants of it if
you have ever used popular modeling software such as Blender or many of Autodesk’s
products. In this section, we discuss the details behind the Arcball mechanism and
how to implement it with basic rotation matrices; the sections after this one discuss an
alternative, more elegant way to implement the Arcball using a construct known as the
quaternion.
The best way to get a sense of how the Arcball works is by seeing a demonstration, so let us begin
by considering the following movie (if a picture is worth 1000 words, how many words is a movie
worth?):
The above movie shows an OpenGL program that allows us to rotate a given scene with the mouse
via the Arcball. In this case, the scene that we are rotating is a simple one that has the Stanford
bunny mesh centered at the origin. You can see that, usually, when we click and drag the mouse
from one point on the screen to another, the scene rotates in a direction that intuitively
corresponds to the direction in which we move the mouse. And when we click and drag the mouse
near the corners of the screen, the scene rotates only around an axis that perpendicularly intersects
with the center of the screen. This gives us two different ways to rotate the scene with the
mouse.
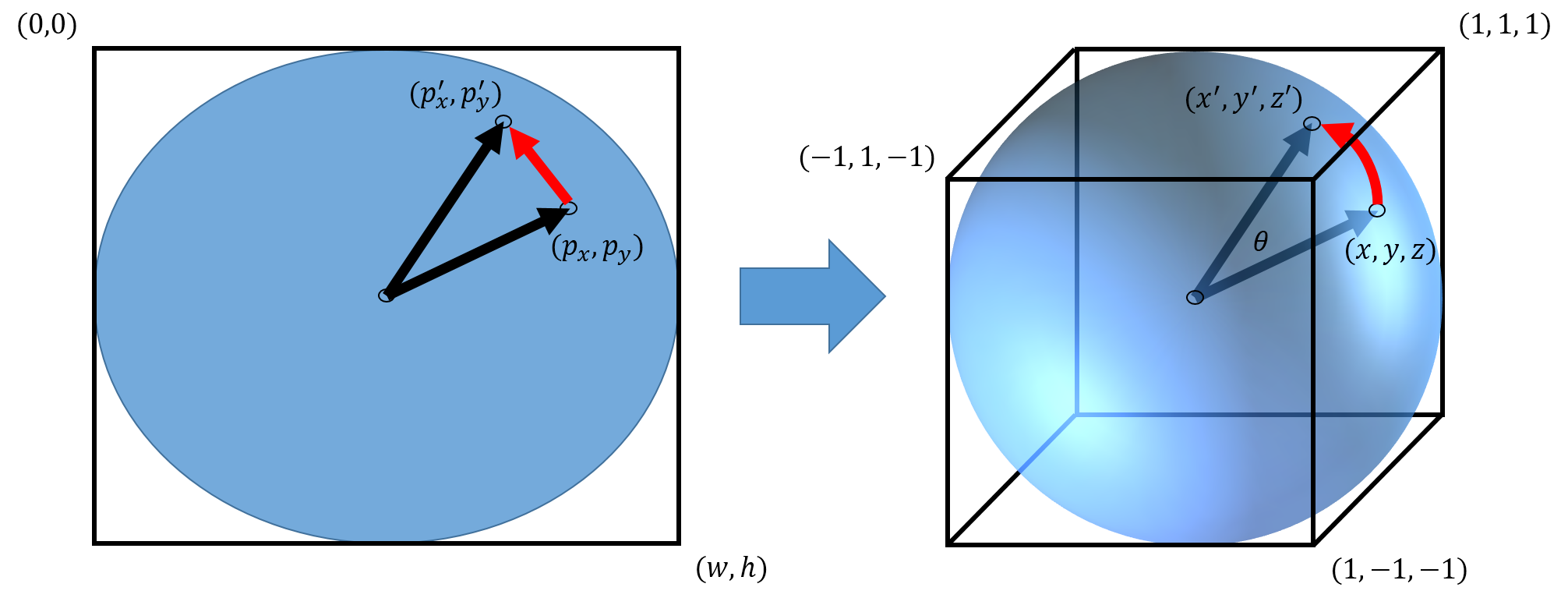
The Arcball works by trying to map a click-and-drag motion of the mouse on the screen to a
rotation about the surface of a sphere of radius 1 that is inscribed into our viewing cube in NDC.
Figure 1 shows a visual of this:
Figure 1: A click-and-drag motion of the mouse on our screen (left) is mapped to a
rotation about the surface of a sphere inscribed into our viewing cube in NDC (right). The
points in the blue region in the left diagram are mapped to points on the surface of the
sphere in the right diagram. Here,
and
are mapped from screen coordinates to
and
in NDC respectively; the z-NDC are computed using a function that we discuss below. The
Arcball method computes the rotation that would take us from the position vector
to the position vector
and uses it to rotate the scene.
Suppose we click our mouse when it is at point
on our screen in screen coordinates, and we move the mouse to another point
on our
screen before we release the mouse button. The Arcball method first converts points
and
from screen
coordinates to NDC, ignoring the missing z-component from the screen coordinates for now. Let us denote
the NDC of
and
with
and
respectively. From here, the Arcball computes z-coordinates for
and
by
trying to map them to points on the surface of a sphere of radius 1, centerted at the origin of our
NDC system. The z-coordinates of the two points are computed with the following
function:
where the
in front of the square root means that we take the positive root. Let us designate our two points
now as
and ,
where
and
were computed using the above function.
The idea of the function is to map, if possible, the start and end points of our mouse motion on the
screen to points on the surface of this inscribed sphere. Suppose both our start and end points
( and
respectively) are mapped onto the surface of the sphere successfully; i.e.
and
.
The Arcball method then computes the rotation that transforms the position vector
to the position
vector .
Both these position vectors are shown in Figure 1.
As we have seen in computer graphics, a rotation can be defined in terms of an angle
and a unit
vector
to rotate about. It is pretty straightforward to see that the rotation angle
and rotation
vector for our
rotation of
to are
given by:
Remember to normalize to make it a unit vector. Also, be careful with floating and double point precisionwhen computing arccos! Imperfect precision can cause the dot product within the arccos to
slightly go above 1 (e.g. 1.00001), which would trigger a NAN from the arccos function. To safely
compute arccos, we should take care to compute it as: arccos( min( 1 , arg )).
Once we have
and ,
we can form our usual axis-angle rotation matrix:
which we can use to rotate our scene.
One nice way to think about the Arcball is to imagine the scene that we see on our screen to be
enclosed and set in-place within a sphere (or ellipsoid if the screen is not perfectly square). When
we click and drag the mouse across the screen, we are essentially grabbing the sphere and rotating
it about the center of the screen; and anything within the sphere rotates along with
it.
In the event that the start and end points of our mouse motion fall outsidethe sphere in NDC, we still use the same process above for determiningthe rotation matrix. What will happen is that a z-component of 0 for the position
vectors just simply results in a rotation about the z-axis (i.e. an axis coming out of
the screen and through its center). This is what causes the two dimensional rotations
that occur in the above movie when we click and drag near the corners of the gray
screen.
In practice, when we implement the Arcball, we rotate the scene after every motion(i.e. change in screen coordinates) of the mouse that takes place between the initialclick and the release of the mouse button. Using the method above, the OpenGL code
structure for the Arcball would look something like the following:
Algorithm 1:
1:functionInit( ... ) 2: ... 3:last_rotation Identity() 4:current_rotation Identity() 5: ... 6:endfunction 7: 8:functionMouse_Click( ... ) 9: 10: ... 11:endfunction 12: 13:functionMouse_Motion( ... ) 14: 15:current_rotation Compute_Rotation_Matrix 16: ... 17:endfunction 18: 19:functionGet_Current_Rotation( ... ) 20:return current_rotation last_rotation 21:endfunction 22: 23:functionMouse_Release( ... ) 24:last_rotation current_rotation last_rotation 25:current_rotation Identity() 26: ... 27:endfunction 28: 29:functionDraw_Scene( ... ) 30:// code to set up screen, camera, etc 31:glMultMatrixd( Get_Current_Rotation() ) 32:// code to set up lights and then draw 33: ... 34:endfunction
where Compute_Rotation_Matrix() on line 15 is the procedure we describe above for
computing the rotation matrix; and glMultMatrixd() on line 31 is the OpenGL function for
transforming the current matrix mode (i.e. projection or modelview) by an arbitrary matrix, which
is passed in as an argument. The passed-in matrix must be a pointer to a 4x4 column-major matrix
structure. Luckily, the C++ matrix library, Eigen, already stores matrices in column-major, so we
can simply pass in the data array of an Eigen matrix (e.g. my_matrix.data()) whenever we
want to use glMultMatrixd().
The above code structure has the Arcball rotate scenes about theorigin. This means though that scenes with translated cameras in the
and
directions will not rotate around the center of the screen, since the world origin wouldn’t
correspond with the screen origin. This is often fine, because when we want to use the
Arcball, it is usually to examine individual meshes; and in these situations, we would find
it most convenient to center the mesh at the origin. Indeed, the Stanford bunny in
the demo video above is centered at the origin to make it easier to examine with the
Arcball.
As a final note for this section, we would like to point out that there is an alternative, moreelegant way to implement the Arcball than the above-mentioned method. Thealternative method is to compute and combine the rotations using a construct knownas the quaternion instead of the usual axis-angle rotation matrices. One advantage that
we can point out right now to using quaternions over rotation matrices is that it allows us to avoid
the computational cost of constantly multiplying rotation matrices every render (line
31, which calls line 20, of Algorithm 1). We will see in the following sections that it is
computationally more efficient to combine rotations using quaternions than rotation
matrices.
The quaternion is an extension of complex numbers that is often used in computer graphics for
representing rotations. Its main uses in computer graphics are in interpolating rotations – which we
will cover later in the class – and, of course, in the Arcball. The theory of quaternions is a large
area of study, and we unfortunately cannot cover all of it within the scope of this class. Rather, we
only present a cursory overview of the concept for the purposes of computer graphics. We do
encourage those who are curious to look more into the matter on their own independent
study.
A quaternion extends the idea of a complex number by adding two more “imaginary”
components. While a complex number simply has a real and an imaginary
() component, quaternions have
a real component () and three
“imaginary” components ().
We generally express quaternions in the following form:
where .
People also often refer to the real component as the
-component instead
of the -component.
Both and
are commonly used, but
for this class, we will use .
The
components of a quaternion satisfy the conditions:
We don’t need to worry about these conditions for the purposes of this class, but they are necessary for
the definition of the quaternion. For those who are curious, the above relationships between the
components correspond to the cross product relationships for the unit Cartesian vectors:
We often find it convenient to represent quaternions as pairs of, with, and
. Using this
notation, we introduce the following basic arithmetic operations in the context of quaternions. Given two
quaternions
and ,
we can perform quaternion addition and subtraction as follows:
Given a constant ,
we also have scalar multiplication of a quaternion as follows:
The product between two quaternions is given by:
where the first line can be simplified to the second line with some algebra.
Just like how a complex number has a complex conjugate, a quaternion
has its
own defined quaternion conjugate:
As one might expect, the norm of a quaternion is given by:
To normalize a quaternion into a unit quaternion, we simply divide the quaternion by its norm.
Note that, similar to complex numbers, we also have the following relationship involving the
conjugate and norm for quaternions:
Finally, the inverse of a quaternion is defined as:
If we multiply a quaternion by its own inverse, then we get the expected identity:
In the context of rotations, quaternions give us a simple way to encode both the axis and angle of a rotation in a
set of 4 numbers. Let
be the unit vector that represents our rotation axis of interest in
, and let
be the
rotation angle. We define the corresponding quaternion for this rotation using an extension of Euler’sformula (i.e.
as so:
To apply our rotation
on a point , we first
represent as the quaternion
, and then evaluate
the conjugation of
by ,
defined to be:
We can show through some algebra that
evaluates to ,
which contains the new, rotated position of our original point
within
the vector component of the quaternion. As a side note, it can also be shown that the conjugation
operation can be algebraically simplified into the general axis-angle rotation matrix that we have
been using throughout this class (i.e. one way to prove the correctness of our usual axis-angle
rotation matrix is through quaternions).
To clarify the conversion between the axis-angle and quaternion representations of rotations,
we explicitly list out the conversion equations below. Let our unit rotation axis be denoted with
, our rotation angle
be , and our unit
quaternion be .
Then:
And taking note that ,
we have:
The square root, arccos, and division in the last four equations are a bit discerning because they
are functions known to lead to singularities. Thankfully, only the division can actually lead to a
singularity.
Because is a unit
quaternion, ,
so we do not need to worry about the square root or inverse cosine returning
anything but a real number. However, it is possible for the square root to be 0.
If that were the case, then we would get a divide-by-zero when computing any
of the axis components. This would be an issue if it were not for the fact that
. For the square
root to be 0, must
be 1. But if , then
. This allows us to specify
any arbitrary axis for ,
since a rotation angle of
means that we have no rotation at all. So in the event that the square root is zero, we canset tobe any arbitrary axis.
It can also be shown that we can directly express a quaternionas thefollowing rotation matrix:
Finally, just like how we can combine rotations by multiplying their matrix representations
together, we can also combine rotations by multiplying their quaternionrepresentations together. That is, given two rotations represented by quaternions
and
, the
product:
corresponds to the rotation obtained by first applying the rotation represented by
and then applying the
rotation represented by .
This is a much more elegant way of combining rotations than multiplying their axis-angle rotation
matrices, which is more computationally expensive.
Using what we know about quaternions, we can modify Algorithm 1 to produce a more efficient
Arcball implementation:
Algorithm 2:
1:functionInit( ... ) 2: ... 3:last_rotation Identity() 4:current_rotation Identity() 5: ... 6:endfunction 7: 8:functionMouse_Click( ... ) 9: 10: ... 11:endfunction 12: 13:functionMouse_Motion( ... ) 14: 15:current_rotation Compute_Rotation_Quaternion 16: ... 17:endfunction 18: 19:functionGet_Current_Rotation( ... ) 20:return current_rotation last_rotation 21:endfunction 22: 23:functionMouse_Release( ... ) 24:last_rotation current_rotation last_rotation 25:current_rotation Identity() 26: ... 27:endfunction 28: 29:functionDraw_Scene( ... ) 30:// code to set up screen, camera, etc 31:glMultMatrixd( Get_Current_Rotation() ) 32:// code to set up lights and then draw 33: ... 34:endfunction
This time, last_rotation and current_rotation are quaternions rather than rotation
matrices. This makes line 20, which frequently gets called by line 31, less computationally
expensive. Notice how the only matrix operation that occurs now is the mandatory OpenGL call to
glMultMatrixd().
The structure of the code remains the same with only a couple of changes in the form of new
functions. The Compute_Rotation_Quaternion() function computes the unit rotation axis
and rotation angle based on the passed-in points and returns the quaternion that represents the
rotation. The Get_Rotation_Matrix() function converts a given unit quaternion to a rotation
matrix. For the latter function, it would be best to directly express the quaternion as the following
rotation matrix:
This would be faster than converting the quaternion to its axis-angle representation and then
forming the axis-angle rotation matrix; it also avoids the need to call the sine and cosine
functions.