If you have ever played any kind of map-based game on the computer, you have probably encountered computer-controlled units that know how to get from point A to point B all by themselves. This is actually a common problem in both games and other kinds of software, how to generate a path from a starting location to a desired destination that successfully navigates obstacles.
One very widely used algorithm for this kind of problem is called A* (pronounced "A-star"), and it is a very effective algorithm for pathfinding in a computer program. The algorithm is conceptually pretty simple. Starting with the initial location, it incrementally builds a path from the source to the destination, always using the "best path so far" to take the next step. This ensures that the final path will also be the optimal one. (If you want to learn much more about the A* pathfinding algorithm, you can start with the Wikipedia article on A*, and follow the references the article gives.)
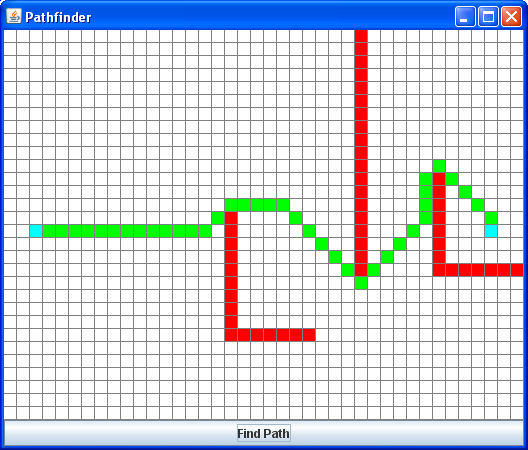
Fortunately, you don't have to implement the A* algorithm; this has already been done for you. In fact, there is even a nice little user interface for you to experiment with the A* algorithm:
You can click on the various squares to turn them into barriers (red) or passable cells (white). The blue cells mark the start and end of the path. Clicking on the "Find Path" button will compute a path using A*, and then display it in green. Or, if there is no path from start to end, the program will simply not show any path.
The A* algorithm has a lot of information to keep track of, and the Java collection classes are perfect for this kind of task. There are two main kinds of information that this A* implementation must manage:
As the A* algorithm builds its path, it must maintain two primary collections of waypoints:
Each iteration of the A* algorithm is pretty simple: find the least costly waypoint from the set of open waypoints, take a step in every direction from that waypoint to generate new open waypoints, and then move the waypoint from the open set to the closed set. This is repeated until the current waypoint happens to be at the destination! If, during this process, the algorithm runs out of open waypoints, there is no path from the starting point to the destination.
This processing depends primarily on the locations of waypoints, so it is very useful to store waypoints as mappings from locations to their corresponding waypoints. Thus, you will use the java.util.HashMap container for each of these collections, with Location objects as the keys, and Waypoint objects as the values.
Note that the application will compile successfully as-is, but the path-finding functionality won't work until you complete the assignment.
The only classes you should have to edit will be Location and AStarState. Everything else is framework code that allows you to edit the map and display the path that the algorithm generates. (If you find yourself editing any of the other source files to get the lab to work then stop and ask for help!)
The first thing that needs to be done is that the Location class must be prepared for use with the Java collection classes. Since you will be using hashing containers for this assignment, this involves:
Add an implementation of each of these methods to the Location class, following the patterns outlined in class. Once this is completed, you can use the Location class as a key type in hashing containers like HashSet and HashMap.
Once the Location class is ready to use as a key, you can finish the implementation of the AStarState class. This is the class that maintains the sets of open and closed waypoints, so it really provides the core functionality for the A* implementation.
As mentioned previously, the A* state consists of two collections of waypoints, one of open waypoints, and the other of closed waypoints. To facilitate the algorithm, waypoints will be stored in a hash-map, with the waypoint locations being the keys and the waypoints themselves being the values. Thus, you will have a type like this:
HashMap<Location, Waypoint>
(An obvious implication of this is that each map location can have only one waypoint associated with it. This is exactly what we want.)
Add two (non-static) fields to the AStarState class with this type, one for "open waypoints" and the other for "closed waypoints." Also, make sure to initialize each of these fields to refer to a new, empty collection.
Once you have the fields set up and initialized properly, you will need to implement the following methods on the AStarState class:public int numOpenWaypoints()
This method should simply return the number of waypoints in the collection of open waypoints. (Yep it'll be a one-liner...)
public Waypoint getMinOpenWaypoint()
This function should scan through all waypoints in the collection of open waypoints, and return a reference to the waypoint with the smallest total cost. If there are no waypoints in the "open" collection, return null.
Don't remove the waypoint from the collection when you return it; just return a reference to the waypoint with the smallest total cost.
public boolean addOpenWaypoint(Waypoint newWP)
This is the most complicated method in the A* state class, but honestly it is still pretty simple. What makes it more complicated than the rest is that it should only add the specified waypoint if an existing waypoint at the location is worse than the new one. Here is what the method must do:
If there is already a waypoint for this location in the "open waypoints" collection, then only add the new waypoint if the "previous cost" for the new waypoint is less than the "previous cost" for the current waypoint. (Make sure to use the previous cost and not the total cost.) In other words, if the new waypoint represents a shorter path to that location than the current waypoint does, replace the current waypoint with the new one.
You can see that you will have to retrieve the existing waypoint from the "open" collection, if there is one, and act accordingly. Fortunately, it is very simple to replace a previous waypoint with a new one; just use the HashMap.put() method like usual, and it will replace the old key-value mapping with the new one.
Finally, have this method return true if the new waypoint was added to the collection of open waypoints, or false if the new waypoint wasn't actually added.
public boolean isLocationClosed(Location loc)
This function should return true if the specified location appears in the collection of closed waypoints, or false otherwise. Since the closed waypoints are stored in a hash-map with locations as the key values, this should be quite simple to implement.
public void closeWaypoint(Location loc)
This function takes a waypoint and moves it from the collection of open waypoints to the collection of closed waypoints. Since waypoints are keyed by their location, the method takes the location of the waypoint.
The process should be simple:
Once you get the above functionality implemented, give the pathfinding program a run to see if it works properly. If you have implemented everything correctly, you shouldn't have any problem creating obstacles and then finding paths around them.
You can compile and run the program the same way as always:
javac *.java
java AStarApp
After you have convinced yourself that everything works correctly, go ahead and submit your work via csman!